




 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~2) 被測(cè)傳感器安裝部位采用XY雙軸電動(dòng)調(diào)整滑臺(tái),調(diào)整氣隙和位置。
3) 選用高品質(zhì)美國(guó)TEK或安捷倫示波器,進(jìn)行波形分析和記錄。
4) 提供0-6000rpm轉(zhuǎn)速動(dòng)力機(jī)構(gòu),伺服全閉環(huán)控制,位置控制精度高,最大扭矩5NM。
5) 系統(tǒng)配置臺(tái)灣固緯程控線性穩(wěn)壓工作電源給傳感器供電,供電電壓0-30V,電流0-3A,功率90W。
6) 測(cè)試為手動(dòng)模式,可任意設(shè)置信號(hào)輪轉(zhuǎn)速,查看被測(cè)傳感器的信號(hào)波形;
7) 目標(biāo)輪配置一種:目標(biāo)輪參數(shù)由客戶提供。
8) 磁電式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
9) 霍爾式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
10) 測(cè)試結(jié)果自動(dòng)完成, 自動(dòng)顯示; 并根據(jù)設(shè)定的標(biāo)準(zhǔn)判斷“合格”和“不合格”



1.1 測(cè)試要求
1) 測(cè)試臺(tái)用于傳感器在模擬工作狀態(tài)時(shí)的輸出特性, 即目標(biāo)輪旋轉(zhuǎn)時(shí),相對(duì)目標(biāo)輪安裝的傳感器的插頭輸出信號(hào)。
2) 傳感器主要分兩類:
a) 磁電式(VR)的輸出信號(hào)為模擬正弦波形的。輸出信號(hào)的幅度和頻率與飛輪速度有關(guān);
b) 霍爾效應(yīng)傳感器(Hall Effect)的輸出為方波, 即高低電平。
3) 測(cè)試臺(tái)有一旋轉(zhuǎn)軸(垂直軸),軸上安裝目標(biāo)輪,目標(biāo)輪參數(shù)由客戶提供; 由調(diào)速馬達(dá)驅(qū)動(dòng), 轉(zhuǎn)速可以設(shè)定并顯示。目標(biāo)輪其上按規(guī)定分布齒和槽。轉(zhuǎn)速的范圍為300-6000 rpm;
4) 測(cè)試臺(tái)有一套夾具工裝,用來安裝固定待測(cè)試的傳感器, 該工裝夾具為非鐵磁性材料,對(duì)傳感器的影響小。可以調(diào)節(jié)傳感器探頭相對(duì)于目標(biāo)輪中心軸的位置,即調(diào)整偏置和空氣間隙大小。傳感器和目標(biāo)輪安裝示意見后圖。
5) 磁電式傳感器不需要工作供電, 但是需要接一個(gè)負(fù)載電路, 測(cè)試輸出端之間的電壓或電流(通常為電壓), 特定轉(zhuǎn)速下的波形特征值, 如峰-峰電壓。一般用示波器顯示和讀取。同時(shí)測(cè)試極性, 即齒槽轉(zhuǎn)換時(shí)電壓正負(fù)轉(zhuǎn)換關(guān)系。
6) 霍爾傳感器需要一穩(wěn)定的直流工作電壓, 5V 或12V。另外兩端子為輸出的正負(fù)極。需要測(cè)試的參數(shù)有: 高電平、低電平、上升時(shí)間、下降時(shí)間、上升和下降時(shí)間的精度。
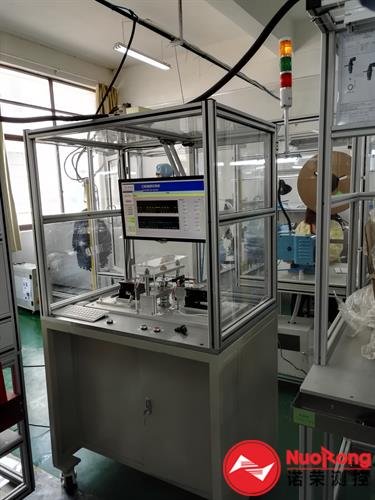
1.2 功能
1) 單工位設(shè)計(jì),多種測(cè)試功能可方便切換。
2) 被測(cè)傳感器安裝部位采用XY雙軸電動(dòng)調(diào)整滑臺(tái),調(diào)整氣隙和位置。
3) 選用高品質(zhì)美國(guó)TEK或安捷倫示波器,進(jìn)行波形分析和記錄。
4) 提供0-6000rpm轉(zhuǎn)速動(dòng)力機(jī)構(gòu),伺服全閉環(huán)控制,位置控制精度高,最大扭矩5NM。
5) 系統(tǒng)配置臺(tái)灣固緯程控線性穩(wěn)壓工作電源給傳感器供電,供電電壓0-30V,電流0-3A,功率90W。
6) 測(cè)試為手動(dòng)模式,可任意設(shè)置信號(hào)輪轉(zhuǎn)速,查看被測(cè)傳感器的信號(hào)波形;
7) 目標(biāo)輪配置一種:目標(biāo)輪參數(shù)由客戶提供。
8) 磁電式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
9) 霍爾式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
10) 測(cè)試結(jié)果自動(dòng)完成, 自動(dòng)顯示; 并根據(jù)設(shè)定的標(biāo)準(zhǔn)判斷“合格”和“不合格”
臺(tái)")
臺(tái)")
2) 被測(cè)傳感器安裝部位采用XY雙軸電動(dòng)調(diào)整滑臺(tái),調(diào)整氣隙和位置。
3) 選用高品質(zhì)美國(guó)TEK或安捷倫示波器,進(jìn)行波形分析和記錄。
4) 提供0-6000rpm轉(zhuǎn)速動(dòng)力機(jī)構(gòu),伺服全閉環(huán)控制,位置控制精度高,最大扭矩5NM。
5) 系統(tǒng)配置臺(tái)灣固緯程控線性穩(wěn)壓工作電源給傳感器供電,供電電壓0-30V,電流0-3A,功率90W。
6) 測(cè)試為手動(dòng)模式,可任意設(shè)置信號(hào)輪轉(zhuǎn)速,查看被測(cè)傳感器的信號(hào)波形;
7) 目標(biāo)輪配置一種:目標(biāo)輪參數(shù)由客戶提供。
8) 磁電式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
9) 霍爾式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
10) 測(cè)試結(jié)果自動(dòng)完成, 自動(dòng)顯示; 并根據(jù)設(shè)定的標(biāo)準(zhǔn)判斷“合格”和“不合格”
1.1 測(cè)試要求
1) 測(cè)試臺(tái)用于傳感器在模擬工作狀態(tài)時(shí)的輸出特性, 即目標(biāo)輪旋轉(zhuǎn)時(shí),相對(duì)目標(biāo)輪安裝的傳感器的插頭輸出信號(hào)。
2) 傳感器主要分兩類:
a) 磁電式(VR)的輸出信號(hào)為模擬正弦波形的。輸出信號(hào)的幅度和頻率與飛輪速度有關(guān);
b) 霍爾效應(yīng)傳感器(Hall Effect)的輸出為方波, 即高低電平。
3) 測(cè)試臺(tái)有一旋轉(zhuǎn)軸(垂直軸),軸上安裝目標(biāo)輪,目標(biāo)輪參數(shù)由客戶提供; 由調(diào)速馬達(dá)驅(qū)動(dòng), 轉(zhuǎn)速可以設(shè)定并顯示。目標(biāo)輪其上按規(guī)定分布齒和槽。轉(zhuǎn)速的范圍為300-6000 rpm;
4) 測(cè)試臺(tái)有一套夾具工裝,用來安裝固定待測(cè)試的傳感器, 該工裝夾具為非鐵磁性材料,對(duì)傳感器的影響小。可以調(diào)節(jié)傳感器探頭相對(duì)于目標(biāo)輪中心軸的位置,即調(diào)整偏置和空氣間隙大小。傳感器和目標(biāo)輪安裝示意見后圖。
5) 磁電式傳感器不需要工作供電, 但是需要接一個(gè)負(fù)載電路, 測(cè)試輸出端之間的電壓或電流(通常為電壓), 特定轉(zhuǎn)速下的波形特征值, 如峰-峰電壓。一般用示波器顯示和讀取。同時(shí)測(cè)試極性, 即齒槽轉(zhuǎn)換時(shí)電壓正負(fù)轉(zhuǎn)換關(guān)系。
6) 霍爾傳感器需要一穩(wěn)定的直流工作電壓, 5V 或12V。另外兩端子為輸出的正負(fù)極。需要測(cè)試的參數(shù)有: 高電平、低電平、上升時(shí)間、下降時(shí)間、上升和下降時(shí)間的精度。
1.2 功能
1) 單工位設(shè)計(jì),多種測(cè)試功能可方便切換。
2) 被測(cè)傳感器安裝部位采用XY雙軸電動(dòng)調(diào)整滑臺(tái),調(diào)整氣隙和位置。
3) 選用高品質(zhì)美國(guó)TEK或安捷倫示波器,進(jìn)行波形分析和記錄。
4) 提供0-6000rpm轉(zhuǎn)速動(dòng)力機(jī)構(gòu),伺服全閉環(huán)控制,位置控制精度高,最大扭矩5NM。
5) 系統(tǒng)配置臺(tái)灣固緯程控線性穩(wěn)壓工作電源給傳感器供電,供電電壓0-30V,電流0-3A,功率90W。
6) 測(cè)試為手動(dòng)模式,可任意設(shè)置信號(hào)輪轉(zhuǎn)速,查看被測(cè)傳感器的信號(hào)波形;
7) 目標(biāo)輪配置一種:目標(biāo)輪參數(shù)由客戶提供。
8) 磁電式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
9) 霍爾式傳感器:
a) 在特定空氣間隙、特定轉(zhuǎn)速下(分別在低速、中速和高速下)的輸出信號(hào)峰值、谷值、峰峰值、頻率、上升時(shí)間、下降時(shí)間、極性;
10) 測(cè)試結(jié)果自動(dòng)完成, 自動(dòng)顯示; 并根據(jù)設(shè)定的標(biāo)準(zhǔn)判斷“合格”和“不合格”
速傳感器性能測(cè)試臺(tái)")
備")
化整合設(shè)備")
設(shè)備")
試臺(tái)")
設(shè)備")
設(shè)備")

試儀")

試臺(tái)")
氣密性測(cè)試臺(tái)")


節(jié)漏孔")
式氣密測(cè)試臺(tái)")
力電池PACK氣密性測(cè)試臺(tái)")
試設(shè)備")
試臺(tái)")
驗(yàn)臺(tái)")
試臺(tái)")
接插頭三通道差壓檢漏儀")
試臺(tái)")
車輪轂密封性測(cè)試")
車PACK氣密性測(cè)試臺(tái)")
試")
試臺(tái)")
試臺(tái)")

約版差壓氣密檢漏儀")

取消
清空記錄
歷史記錄
清空記錄
歷史記錄

